トヨタ アルファード 30後期 ミリ波レーダーの光軸調整│尾張旭市 車検・整備





今回は、下記の続きの作業になります。
https://dekiteru.net/cms/em_free.php?id=12248&rid=130
トヨタ アルファード 30後期の車高調取付後のエーミング作業の続きで、ミリ波レーダー調整を行います。
ミリ波レーダーは、単眼カメラと先行車を認識して、車速に応じた車間距離を保ちながら追従走行を支援。
高速道路の渋滞走行時や停止・発進を繰り返す時などめちゃくちゃ楽です。
車高を落とすとレーダーは狂うのかと考えると、前後均等に下げれば問題ない!!と思いがち(=_=)
ところが、多少の補正機能があると研修で聞きました。
オートハイビームと一緒で後ろが下がると上向きを検知してレーダーを補正する??(;・∀・)
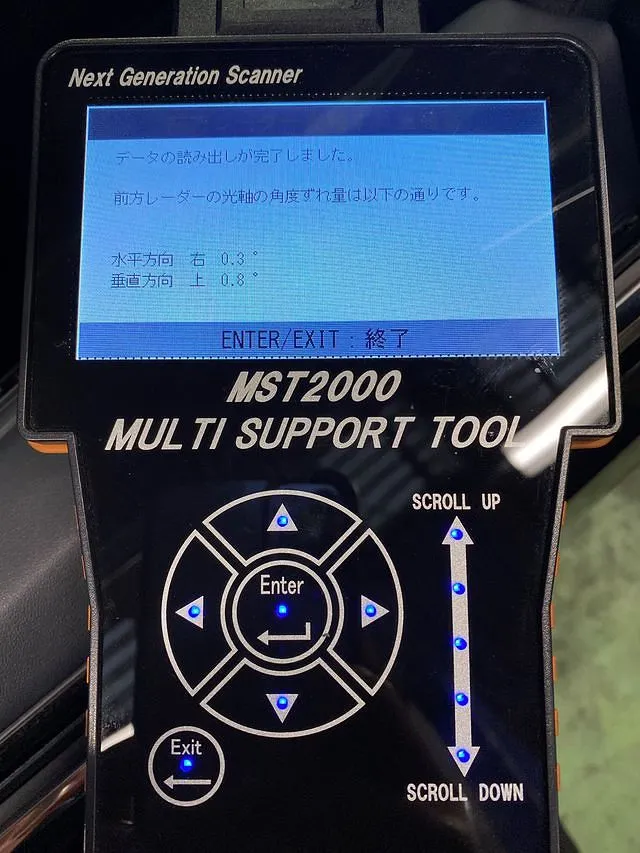
実際は何で検知しているかわからないですが、この車だと新車時の設定から
水平方向 右に0.3°
垂直方向 上に0.8°
水平方向はちょっと?ですが、垂直方向は下げた分上向いてますよ。ってわかります。
レーダーも補正かかって下向いてるんじゃないかと判断(*^^)v
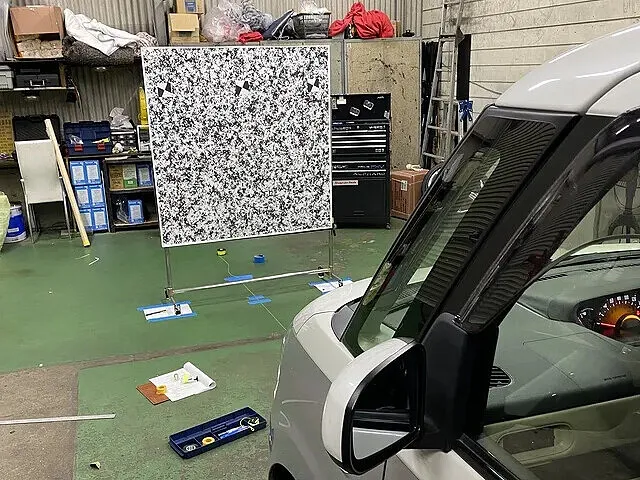
前方レーダー光軸調整は、車高の高さ関係なく、車両のミリメータウェーブレーダセンサ(エンブレム)中心とSST(リフレクタ)の高さを同じにするのみ!
あとは単眼カメラのエーミングと一緒で車のセンターを計り、3000mmの位置に設置して光軸調整を開始!
基準値が、
水平方向 -0.5°to0.5°
垂直方向 -0.5°to0.5°
基準値外( ゚Д゚)

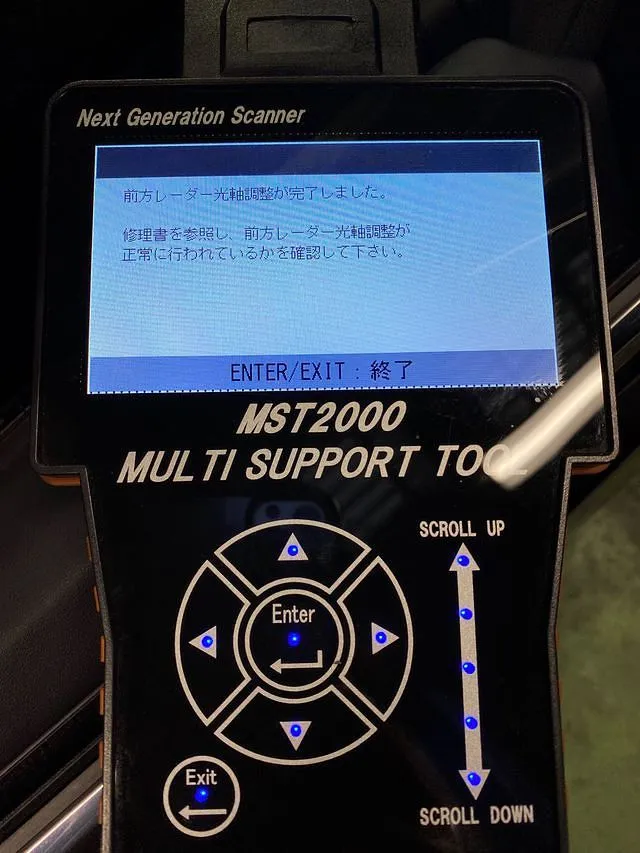
トヨタ アルファード 30後期のミリ波レーダー調整が完了しました。
ミリ波レーダーの光軸調整はやった方がいいかもですね(*'▽')
100m先を感知するレーダーなので0.8°のズレはかなり大きいと思います。
光軸調整後の試運転!(^^)!気のせいかと思いますが、先行車の検知が早くなったかも?って感じです。車高落として気になる方はご連絡ください。
エーミングの他にも、各種点検やオイル交換、タイヤ交換、バッテリー交換、ブレーキパッド交換といった車整備はウェイクアップにお任せください。
エーミング作業は、地方運輸局の認証を受けた「認証工場」や「指定工場」でなければ行うことができません。
尾張旭市にあるウェイクアップは、国の認証工場なので、フロントガラス交換後やフレーム修正後のエーミング作業まで一貫して対応が可能。
先進安全装置が搭載された最新車両の修理や整備はお任せください。
尾張旭市の方だけでなく、春日井市や名古屋市、長久手市にお住まいの方もお問合せはお気軽にどうぞ♪

尾張旭市にあるウェイクアップは、1万台以上の豊富な実績を誇るトータルカーショップです。
車の販売(新車・中古車・カーリース)から車検・整備や修理まで、車のことは何でもお任せください。ランクルの盗難防止対策や持ち込みパーツ取付など、他店で断られた内容でも対応が可能です。
尾張旭市の方だけでなく、春日井市や名古屋市、長久手市にお住まいの方もお気軽にお問合せください♪
通常ダイヤル:0561-52-6006
レンタカー専用ダイヤル:0561-53-2500
※「HPを見た」とお伝え頂くとスムーズです。
【新車/カーリース/中古車販売】
に関するお問合せはこちら。
 料金案内(電装品)
料金案内(電装品)
 車検整備の作業内容
車検整備の作業内容
 H19 WRX STi インプレッサのブレーキパッド&ディスク部品持込交換!工賃¥25,000|愛知県尾張旭市
H19 WRX STi インプレッサのブレーキパッド&ディスク部品持込交換!工賃¥25,000|愛知県尾張旭市
 ホンダ ストリーム ヘッドライトロービーム球切れ バラスト交換 工賃:約16,500円│尾張旭市 車検・整備
ホンダ ストリーム ヘッドライトロービーム球切れ バラスト交換 工賃:約16,500円│尾張旭市 車検・整備
 ダイハツ コペン L880K 12ヵ月点検 ラジエーター水漏れ修理 ラジエーター交換 工賃:約16,500円│尾張旭市 車検・整備
ダイハツ コペン L880K 12ヵ月点検 ラジエーター水漏れ修理 ラジエーター交換 工賃:約16,500円│尾張旭市 車検・整備
 ホンダ S2000 クラッチオイル漏れ修理 レリーズシリンダー交換 工賃:約16,500円│尾張旭市 車検・整備
ホンダ S2000 クラッチオイル漏れ修理 レリーズシリンダー交換 工賃:約16,500円│尾張旭市 車検・整備
 三菱 ミニキャブバン 定期点検 タイミングベルト交換 工賃:約27,500円│尾張旭市 車検・整備
三菱 ミニキャブバン 定期点検 タイミングベルト交換 工賃:約27,500円│尾張旭市 車検・整備
 レクサス LS 保険修理 タイヤ・ホイール交換 工賃:約3,300円│尾張旭市 車検・整備
レクサス LS 保険修理 タイヤ・ホイール交換 工賃:約3,300円│尾張旭市 車検・整備
 日産 モコ オイル交換・ウォーターポンプ水漏れ交換・ドライブシャフトブーツ交換 工賃:約38,500円│尾張旭市 車検・整備
日産 モコ オイル交換・ウォーターポンプ水漏れ交換・ドライブシャフトブーツ交換 工賃:約38,500円│尾張旭市 車検・整備
 30後期アルファード・30後期ヴェルファイア 愛知県尾張旭市・瀬戸・長久手・守山区
30後期アルファード・30後期ヴェルファイア 愛知県尾張旭市・瀬戸・長久手・守山区
 ダイハツ コペン L880K オイル漏れ修理 タペットカバーパッキン交換│尾張旭市 車修理
ダイハツ コペン L880K オイル漏れ修理 タペットカバーパッキン交換│尾張旭市 車修理
 トヨタ ハイエース 4型 冷却水漏れ修理 タイミングベルト交換・ウォーターポンプ交換 工賃:約44,000円│尾張旭市 車修理
トヨタ ハイエース 4型 冷却水漏れ修理 タイミングベルト交換・ウォーターポンプ交換 工賃:約44,000円│尾張旭市 車修理
 トヨタ クラウン GRS210 オイル漏れ修理 ショックアブソーバー交換 工賃:約16,500円│尾張旭市 車修理
トヨタ クラウン GRS210 オイル漏れ修理 ショックアブソーバー交換 工賃:約16,500円│尾張旭市 車修理
 トヨタ ハリアー ステアリング(ハンドル)交換 アライメント調整 工賃:約8,800円│尾張旭市 車修理
トヨタ ハリアー ステアリング(ハンドル)交換 アライメント調整 工賃:約8,800円│尾張旭市 車修理
 ダイハツ タント LA600S 12ヵ月点検 オイル交換・オイルエレメント交換・ワイパーゴム交換など 点検費用:8,800円(税込)│尾張旭市 車検・整備
ダイハツ タント LA600S 12ヵ月点検 オイル交換・オイルエレメント交換・ワイパーゴム交換など 点検費用:8,800円(税込)│尾張旭市 車検・整備
 日産 セレナ HFC26 エアコン修理 ラジエーターファンモーター交換│尾張旭市 車修理
日産 セレナ HFC26 エアコン修理 ラジエーターファンモーター交換│尾張旭市 車修理
 日産 NV350キャラバン 燃料入れ間違え エンスト プラグ交換│尾張旭市 車修理
日産 NV350キャラバン 燃料入れ間違え エンスト プラグ交換│尾張旭市 車修理
 トヨタ ハイエース 200系 オイル漏れ修理 リアショックアブソーバー交換│尾張旭市 車修理
トヨタ ハイエース 200系 オイル漏れ修理 リアショックアブソーバー交換│尾張旭市 車修理
 トヨタ クラウン AZSH20 フロントガラス交換 エーミング作業│尾張旭市 車検・整備
トヨタ クラウン AZSH20 フロントガラス交換 エーミング作業│尾張旭市 車検・整備
 トヨタ アルファード 30後期 車高調取付後のエーミング作業①│尾張旭市 車検・整備
トヨタ アルファード 30後期 車高調取付後のエーミング作業② ミリ波レーダーの光軸調整│尾張旭市 車検・整備
トヨタ アルファード 30後期 車高調取付後のエーミング作業①│尾張旭市 車検・整備
トヨタ アルファード 30後期 車高調取付後のエーミング作業② ミリ波レーダーの光軸調整│尾張旭市 車検・整備  ダイハツ ムーヴキャンバス エーミング作業│尾張旭市 車検・整備
ダイハツ ムーヴキャンバス エーミング作業│尾張旭市 車検・整備
 レクサスLS スパークプラグ交換│尾張旭市 車検・整備
レクサスLS スパークプラグ交換│尾張旭市 車検・整備
 トヨタ ランドクルーザー 300ZX セキュリティ加工 盗難防止対策│尾張旭市 パーツ取付
トヨタ ランドクルーザー 300ZX セキュリティ加工 盗難防止対策│尾張旭市 パーツ取付
 エスティマ 足回り異音修理 サスペンション交換|尾張旭市 車検・整備
エスティマ 足回り異音修理 サスペンション交換|尾張旭市 車検・整備
 デリカ ラジエーター交換 冷却水漏れ|尾張旭市 車検・整備
デリカ ラジエーター交換 冷却水漏れ|尾張旭市 車検・整備
 レクサス GS ドアミラー角度調整不良 モーター交換│尾張旭市 修理
レクサス GS ドアミラー角度調整不良 モーター交換│尾張旭市 修理
 ダイハツ キャスト フロント事故修理 レーザーレーダーセンサー交換 エーミング作業│尾張旭市 修理
ダイハツ キャスト フロント事故修理 レーザーレーダーセンサー交換 エーミング作業│尾張旭市 修理
 トヨタ クラウン リアドア 線キズ修理│尾張旭市 鈑金塗装
トヨタ クラウン リアドア 線キズ修理│尾張旭市 鈑金塗装
 日産 セレナ エンジンオイル漏れ修理 エンジン交換│尾張旭市 修理
日産 セレナ エンジンオイル漏れ修理 エンジン交換│尾張旭市 修理
 マツダ CX-5 ドアミラー電格不良 オーバーホール モーター交換│尾張旭市 車検・整備
マツダ CX-5 ドアミラー電格不良 オーバーホール モーター交換│尾張旭市 車検・整備
 マツダ CX-8 電動パーキングブレーキ警告灯 リアブレーキパッド交換│尾張旭市 車検・整備
マツダ CX-8 電動パーキングブレーキ警告灯 リアブレーキパッド交換│尾張旭市 車検・整備
 日産 デュアリス 異音修理 メンバー交換│尾張旭市 車検・整備
日産 デュアリス 異音修理 メンバー交換│尾張旭市 車検・整備
 クラウンAWS210 車高調整|尾張旭市 車検・整備
クラウンAWS210 車高調整|尾張旭市 車検・整備
 マツダ CX8 リアディスクパッド交換|尾張旭市 車検・整備
マツダ CX8 リアディスクパッド交換|尾張旭市 車検・整備
 マツダ CX5 ドアミラー電動格納の不良修理|尾張旭市 車検・整備
マツダ CX5 ドアミラー電動格納の不良修理|尾張旭市 車検・整備
 日産 デュアリス 異音修理 エンジンマウント切れ|尾張旭市 車検・整備
日産 デュアリス 異音修理 エンジンマウント切れ|尾張旭市 車検・整備
 スバル インプレッサ エンジンチェックランプ点灯・アイドリング不調修理 O2センサー交換|尾張旭市 車検・整備
スバル インプレッサ エンジンチェックランプ点灯・アイドリング不調修理 O2センサー交換|尾張旭市 車検・整備
 三菱 デリカ 振動修理 ドライブシャフト交換|尾張旭市 車修理
三菱 デリカ 振動修理 ドライブシャフト交換|尾張旭市 車修理
 三菱 デリカ 異音修理 コトコト音 タイロッドエンド交換|尾張旭市 車修理
三菱 デリカ 異音修理 コトコト音 タイロッドエンド交換|尾張旭市 車修理
 12ヵ月点検 ブレーキパッド交換│尾張旭市 車検・整備
12ヵ月点検 ブレーキパッド交換│尾張旭市 車検・整備
 トヨタ アルファード タイヤ裏組み作業 20インチホイール|尾張旭市 車検・整備
トヨタ アルファード タイヤ裏組み作業 20インチホイール|尾張旭市 車検・整備
 スバル レガシィツーリング ブレーキの引きずり修理 キャリパーオーバーホール|尾張旭市 車修理
スバル レガシィツーリング ブレーキの引きずり修理 キャリパーオーバーホール|尾張旭市 車修理
H19 WRX STi インプレッサのブレーキパッド&ディスク部品持込交換!工賃¥25,000|愛知県尾張旭市
ホンダ ストリーム ヘッドライトロービーム球切れ バラスト交換 工賃:約16,500円│尾張旭市 車検・整備
ダイハツ コペン L880K 12ヵ月点検 ラジエーター水漏れ修理 ラジエーター交換 工賃:約16,500円│尾張旭市 車検・整備
ホンダ S2000 クラッチオイル漏れ修理 レリーズシリンダー交換 工賃:約16,500円│尾張旭市 車検・整備
三菱 ミニキャブバン 定期点検 タイミングベルト交換 工賃:約27,500円│尾張旭市 車検・整備
レクサス LS 保険修理 タイヤ・ホイール交換 工賃:約3,300円│尾張旭市 車検・整備
日産 モコ オイル交換・ウォーターポンプ水漏れ交換・ドライブシャフトブーツ交換 工賃:約38,500円│尾張旭市 車検・整備
30後期アルファード・30後期ヴェルファイア 愛知県尾張旭市・瀬戸・長久手・守山区
ダイハツ コペン L880K オイル漏れ修理 タペットカバーパッキン交換│尾張旭市 車修理
トヨタ ハイエース 4型 冷却水漏れ修理 タイミングベルト交換・ウォーターポンプ交換 工賃:約44,000円│尾張旭市 車修理
トヨタ クラウン GRS210 オイル漏れ修理 ショックアブソーバー交換 工賃:約16,500円│尾張旭市 車修理
トヨタ ハリアー ステアリング(ハンドル)交換 アライメント調整 工賃:約8,800円│尾張旭市 車修理
ダイハツ タント LA600S 12ヵ月点検 オイル交換・オイルエレメント交換・ワイパーゴム交換など 点検費用:8,800円(税込)│尾張旭市 車検・整備
日産 セレナ HFC26 エアコン修理 ラジエーターファンモーター交換│尾張旭市 車修理
日産 NV350キャラバン 燃料入れ間違え エンスト プラグ交換│尾張旭市 車修理
トヨタ ハイエース 200系 オイル漏れ修理 リアショックアブソーバー交換│尾張旭市 車修理
トヨタ クラウン AZSH20 フロントガラス交換 エーミング作業│尾張旭市 車検・整備
トヨタ アルファード 30後期 車高調取付後のエーミング作業①│尾張旭市 車検・整備
トヨタ アルファード 30後期 車高調取付後のエーミング作業② ミリ波レーダーの光軸調整│尾張旭市 車検・整備
ダイハツ ムーヴキャンバス エーミング作業│尾張旭市 車検・整備
トヨタ ランドクルーザー 300ZX セキュリティ加工 盗難防止対策│尾張旭市 パーツ取付
エスティマ 足回り異音修理 サスペンション交換|尾張旭市 車検・整備
レクサス GS ドアミラー角度調整不良 モーター交換│尾張旭市 修理
ダイハツ キャスト フロント事故修理 レーザーレーダーセンサー交換 エーミング作業│尾張旭市 修理
日産 セレナ エンジンオイル漏れ修理 エンジン交換│尾張旭市 修理
マツダ CX-5 ドアミラー電格不良 オーバーホール モーター交換│尾張旭市 車検・整備
マツダ CX-8 電動パーキングブレーキ警告灯 リアブレーキパッド交換│尾張旭市 車検・整備
日産 デュアリス 異音修理 メンバー交換│尾張旭市 車検・整備
マツダ CX8 リアディスクパッド交換|尾張旭市 車検・整備
マツダ CX5 ドアミラー電動格納の不良修理|尾張旭市 車検・整備
日産 デュアリス 異音修理 エンジンマウント切れ|尾張旭市 車検・整備
スバル インプレッサ エンジンチェックランプ点灯・アイドリング不調修理 O2センサー交換|尾張旭市 車検・整備
 プジョー207 12ヵ月点検 エンジンオイル漏れ修理 タペットカバーパッキン交換 工賃:約22,000円│尾張旭市 車検・整備
プジョー207 12ヵ月点検 エンジンオイル漏れ修理 タペットカバーパッキン交換 工賃:約22,000円│尾張旭市 車検・整備
 プジョー RCZ エンジンオイル漏れ修理 タペットカバーパッキン・ガスケット交換 工賃:約22,000円│尾張旭市 車検・整備
プジョー RCZ エンジンオイル漏れ修理 タペットカバーパッキン・ガスケット交換 工賃:約22,000円│尾張旭市 車検・整備
尾張旭市の方だけでなく、春日井市や名古屋市、長久手市にお住まいの方もお気軽にご依頼ください♪

疑問に回答いたします。
営業日中に回答いたします。お急ぎの場合はお電話でお問合せください。

携帯1つでご来店いただけます!










このサイトのトップページへ接続されます。
 アウディ A3 窓が閉まらない パワーウィンドウ修理 レギュレーター交換 工賃:約22,000円│尾張旭市 車検・整備
アウディ A3 窓が閉まらない パワーウィンドウ修理 レギュレーター交換 工賃:約22,000円│尾張旭市 車検・整備  MINI クーパーS シフトガタ シフトASSY交換│尾張旭市 車修理
MINI クーパーS シフトガタ シフトASSY交換│尾張旭市 車修理